こんにちは。SS事業部の4号です。
新型コロナウイルスの関係で自粛の日々が続いていますが、
皆さんいかがお過ごしでしょうか?
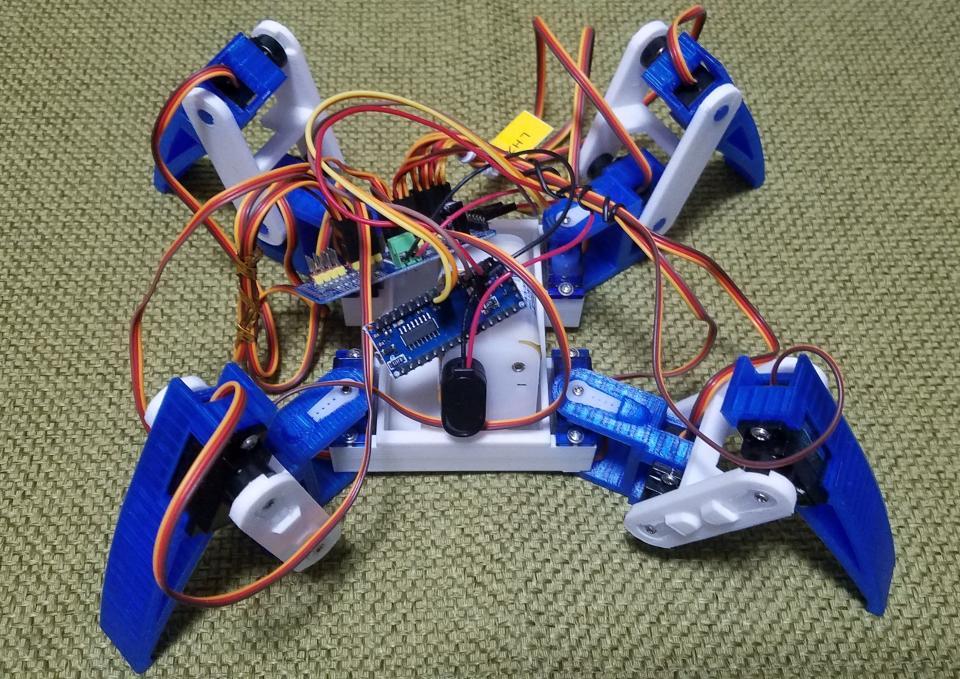
私は4脚ロボットを作成しています。
知り合いの3Dプリンターを使わせてもらい、
ロボットのボディを作成しました。
4つの脚をマイコン (arduino nano) を使ってロボットを動かします。
1本の脚に3つのサーボ、計12個のサーボの角度をプログラミングして動かします。
これが、もう大変なのです!
実際に動かしているときに問題点がたくさん出てきます。
・さっきまで動いていたのに動かない (サーボの故障)
・むしろ勝手に動き出す (自分がそうプログラムしている)
・痙攣を起こす (チャタリング?)
12個のサーボをそれぞれプログラムするのは、
もはや何かの修行かと思いはじめ、
知り合いにアドバイスを求めると逆運動学なるものがあるらしく
逆運動学とは
ある点へ移動するために必要な関節の角度を求める方法?みたいな
(詳しくはぐぐってみてください)
逆運動学を使うためには三角関数を使うようで...
高校の時に使いどころがわからなかったsin、cos、tanはここで使えるのか!
現在、三角関数に苦戦しながら鋭意作成中です。
学生の方は「どこで使うの?」ということでも、将来使うことがあるかも?
しれないので学業頑張ってください!
社会人の方はロボットを作ってみて、
学生の時に勉強した三角関数に再び悩まされるのも良いかと...